

 联系我们
联系我们

1.1机械手类。
机械手的控制器发展较早,也比较成熟,首先介绍了现有控制系统的基本方案。

1.2人类移动机器。
运动机器人控制器属于较新方向,工业移动机器人有AGV、无人驾驶工程机械等形式,控制系统底层方案如下:

1.3对比。
机械手对运动精度和稳定性有很高的要求,所以计算量大,周期短,比一般移动机器人高1——2个量级。移动机器人一般对同步精度要求不高,配置相对较少。
机械手一般工作在固定区域,其控制器一般放置在机箱内,所以防护等级不高,一般为IP20。
由于移动机器人需要频繁运动,特别是户外工程机械,要考虑防水防尘,其防护等级较高,一般为IP67。

2 CoDeSys介绍。
2.1构成CoDeSys。
许多机器人控制软件都是借助CoDeSys实现的,那么CoDeSys又是什么呢?
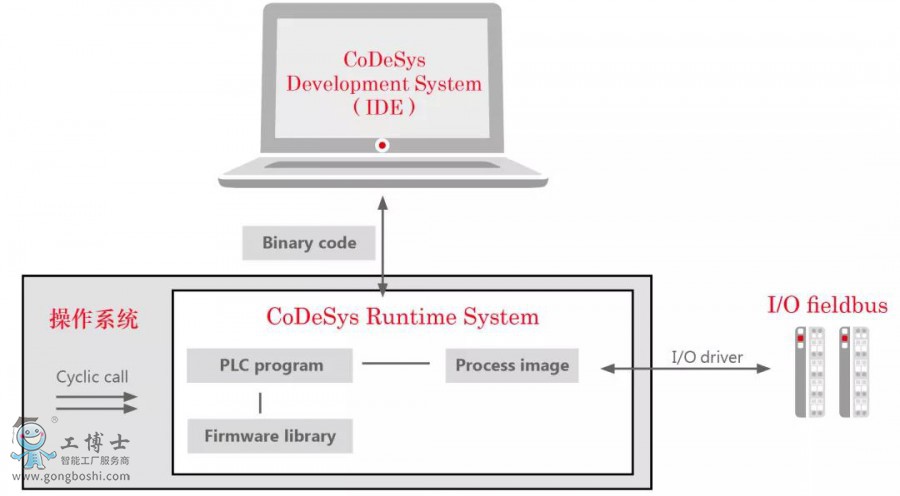
CoDeSys是一个付费的软PLC开发软件,它由两部分组成:开发系统和运行系统。DevelopmentSystem是用于编程的软件界面(如VisualStudio、Eclipse或IDE等软件),PLC程序的设计、调试、编译都在IDE中进行,而PLC程序的设计、调试、编译是用户经常使用的;
当PLC程序写好后,要将其转到硬件设备上运行。但此时生成的PLC程序本身并不能运行,它还需要在一定的软件环境下工作,这个环境就是RuntimeSystem,这部分用户看不到。
IDE一般都安装在开发电脑上,RuntimeSystem是在硬件设备上进行控制,两者一般都使用网线连接,程序是通过网线下载到Runtime运行的。
CoDeSys在国内并不出名,但在欧洲很久,特别是在工业控制领域。许多机器人公司都在用他们的产品,如KEBA、倍福、固高,以及几乎所有的移动机器人控制器制造商。
负责设计CoDeSys的3S公司只卖软件,不卖硬件。系统的硬件电路由用户自行设计,3S公司负责移植RuntimeSystem到客户硬件。RuntimeSystem可以无休止地运行在硬件上,但是通常运行在操作系统上,用户也需要配置操作系统。
根据用户的要求,CoDeSys的IDE可以被定制,用logo和客户的外观代替,这就是为什么你会发现不同厂商的开发平台长得不一样,但风格更相似。
自然,用户也可以使用其他IDE,比如倍福公司就用了微软的VisualStudio,以及其背后的编译器等函数库仍然是采用CoDeSys的方案。
CoDeSys的Runtime支持大多数操作系统和硬件芯片架构,适应性强。
2.2 CoDeSysRuntime原理。
IDE版CoDeSys是免费的,你可以从它的官网下载体验。实际付费的是运行系统运行的系统。
CoDeSys在设计之初就把功能分成了几个组件模块,如总线协议栈、视觉界面、动作控制、安全控制等,用户可以像积木一样挑选必需的模块搭建自己的系统,***后形成一个定制化的软件平台。
有些初接触软PLC的用户可能对这部分感到陌生,但实际上这种设计方法是很常见的。举例来说,MATLABSimulink 的实时工具包(Real-Time)就是这样一种工作方式,用户通过拖动Simulink 的图形界面设计控制程序,然后下载到真实的硬件,在这里就能知道。
也有类似于倍福的使用方法,用户在TwinCATIDE上编写程序,然后下载到倍福的控制器上,实际上预装了一个运行时间控制器。西门子公司的STEP7同样是IDE,在其PLC中有一个与之配套的Runtime。
使用者写的PLC程序就像电脑中的程序一样,运行在RuntimeSystem上,RuntimeSystem则运行在操作系统之上。
运行系统位于应用程序和操作系统之间。这就是所谓的中间件(Middleware)。在机器人软件中,ROS、OROCOS(Real-TimeToolkit)等处于同等位置。
由于机器人的控制,像数控机床一样,对实时性要求很高,所以我们选用的操作系统***好是实时操作系统。可惜,我们经常使用的操作系统没有一个是实时的,比如Windows和Linux。但是幸运的是,有些人已经改变了它们,即加入实时补丁。
常见的实时操作系统有:VxWorks、QNX、WindowsRTX、Xenomai、RTLinux、LinuxRTAI、WinCE、μC/OS、SylixOs等。由于有更多的用户,即Windows和Linux,CoDeSys已经推出了相应的实时补丁(RTE),让用户不用担心修改软件。
2.3 CoDeSys的缺点。
CoDeSys为我们开发控制器提供了方便,使我们不再需要从头开始,但是依赖于CoDeSys这种商业软件来开发自己的控制器产品也有很多缺点:
(1)未公开基础算法。
CoDeSys集成的运动控制组件、总线协议栈都是封装的,用户不能知道其内部的详细信息,也不能根据自己的需要进行自定义优化,只能简单调用。使用者只依赖于CoDeSys平台,难以形成自己的核心技术。
(2)功能有限,难以扩展。
当今以机器视觉、人工智能、自动驾驶等为代表的新技术突飞猛进,许多工业控制技术仍停留在20年前。在移动机器人的导航场景中,基于视觉或激光的导航方法需要采集大量的数据,并对其进行处理,其中涉及到相当多的矩阵计算。
目前PLC只能进行落后的一维数字计算,很难实现复杂的算法。而与此相反的是,人工智能圈子偏爱开源,工业控制圈互相封闭,谁也不愿意开放自己的函数库,开源函数库(OSCAT)极少,甚至***基本的滤波算法、矩阵计算都要自己从头写起。此外,国际标准所提供的基本功能过于有限,无法满足新场景,迫切需要进行扩展。
(3)很难更新。
因为完全依赖于CoDeSys,客户的硬件升级需要移植重新定制,从而导致成本增加。
3开源模式。
现在有一些开放源码的控制系统方案,比如Beremiz,Orocos,OpenPLC,OpenRTM,ORCA。
设计控制器是一项繁重的工作,需要先确定一系列性能要求,首先是实时性。
对工业机器人而言,实时性通常是必需的,对于服务性或娱乐性机器人不一定。人们很容易错误地将“实时性”理解为处理或反应迅速,但事实上,“实时性”代表着时间上的“确定性”,如实时操作系统(RTOS)中的中断响应或进程切换的延迟时间一定在某个时间范围内。
目前常见的操作系统(Windows、Linux)并不都是实时操作系统,因为它们***初设计的是吞吐量,并不能保证在一定范围内处理每一个事件。比方说,标准以太网比实时工业以太网传输速度更快,但它并不是实时的,因为它同样无法保证数据在给定的时间内完成传输。
了解实时性并不难,但是需要实时执行机器人哪些任务?程序运行的间隔时间如何基于机器人的性能需求来决定(1毫秒还是10毫秒)?实时性取决于硬件还是软件?
具体的软硬件是基于实时性的,应该选择ARM还是X86,Linux。
目前工业机械臂的控制周期是1ms左右,性能较高的伺服驱动器位置环的控制周期可以达到125[Math Processing Error] mu sμs。
PLCopen定义了伺服和运动控制的一些标准,包括编程语言、运动控制基础函数块(Function Block)、输入输出接口的参数等[Math Processing Error] ^{[3]}
[3]具体的实现代码细节,这个是由各个厂家提供的。

